Mano Robot
Construí una mano que hasta cierto nivel sigue los movimientos de otra mano en base a una cámara, para esto escribí el siguiente programa:
import cv2
import os
import numpy as np
import mediapipe as mp
webcam=cv2.VideoCapture(0)
mp_hand= mp.solutions.hands
hands = mp_hand.Hands()
mp_drawing_utils = mp.solutions.drawing_utils
def distancia(
punto1,#:mp.framework.formats.landmark_pb2.NormalizedLandmark
punto2#:mp.framework.formats.landmark_pb2.NormalizedLandmark
)->float:
x=(punto1.x-punto2.x)
y=(punto1.y-punto2.y)
return np.sqrt(x\*\*2+y\*\*2)\*1000
def regla_de_tres(referencia:float, mapear:float)->int:
#if mapear>referencia:return 180
v = referencia/350
p = v\*mapear
if int(p)>180:return 180
return int(p)
while webcam.isOpened():
succes, img = webcam.read()
if not succes:break
result = hands.process(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
if result.multi_hand_landmarks:
for hand in result.multi_hand_landmarks:
mitad = distancia(hand.landmark[mp_hand.HandLandmark.WRIST],hand.landmark[mp_hand.HandLandmark.MIDDLE_FINGER_MCP])
medio = distancia(hand.landmark[mp_hand.HandLandmark.MIDDLE_FINGER_TIP],hand.landmark[mp_hand.HandLandmark.MIDDLE_FINGER_MCP])
pulgar = distancia(hand.landmark[mp_hand.HandLandmark.THUMB_TIP],hand.landmark[mp_hand.HandLandmark.THUMB_MCP])
indice = distancia(hand.landmark[mp_hand.HandLandmark.INDEX_FINGER_MCP],hand.landmark[mp_hand.HandLandmark.INDEX_FINGER_TIP])
ring = distancia(hand.landmark[mp_hand.HandLandmark.RING_FINGER_MCP],hand.landmark[mp_hand.HandLandmark.RING_FINGER_TIP])
pinky = distancia(hand.landmark[mp_hand.HandLandmark.PINKY_MCP],hand.landmark[mp_hand.HandLandmark.PINKY_TIP])
print(regla_de_tres(mitad,medio))
print(regla_de_tres(mitad,indice\*1.12)) # Relación 0.9:1 con el medio
print(regla_de_tres(mitad,ring\*1.26)) # Relación 0.8:1 con el medio
print(regla_de_tres(mitad,pinky\*1.58)) # Relación 0.6:1 con el medio
#print(regla_de_tres(mitad,pulgar\*1.25)) # Relación 0.8:1 con el medio
mp_drawing_utils.draw_landmarks(img,hand, mp_hand.HAND_CONNECTIONS)
cv2.imshow("image",img)
cv2.waitKey(1)
webcam.release()
cv2.destroyAllWindows()
Este programa usa mediapipe para poder obtener las imágenes de una cámara y opencv para detectar ciertos puntos de la mano
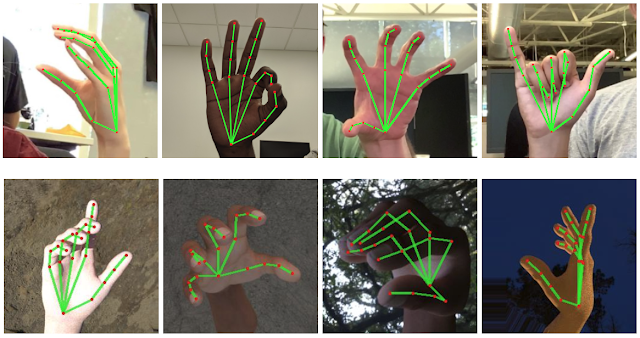
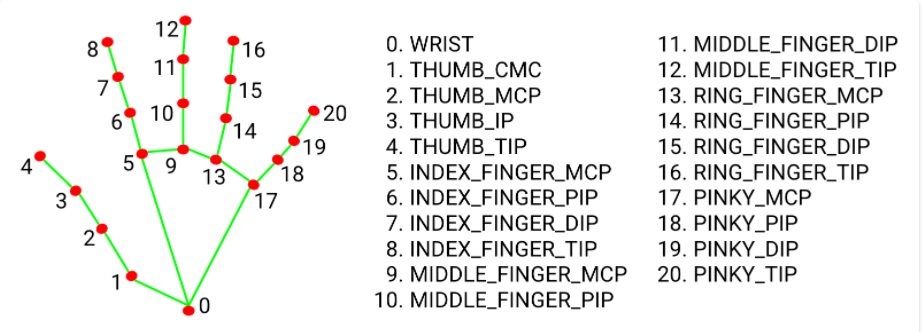
Para poder explicar el por que de las distancias que tome y como lo hice primero hay que ver la mano.
Este es un modelo ya diseñado, este enlace contiene lo necesario para armar la mano hasta cierto nivel, pero yo encontré más conveniente solo imprimir la mano de ese modelo y luego imprimir el antebrazo desde este modelo de aquí también hay que imprimir los modelos que soportan a los servo motores y guian los hilos de los dedos de las mano y estos se encuentran en este modelo así como las poleas de los servos
Como se puede ver, no hay mucho control en el modelo más que hacía delante y hacía atrás, por lo que el programa solo toma en cuenta la distancia desde la punta del dedo hasta la base de este, luego toma como referencia la distancia de la base del dedo medio hasta la muñeca para saber que tanto se movió cada dedo, esto para tener una aproximación y siempre se mueva lo mismo sin importar que tan lejos este la mano de la calamara y el tamaño de la mano.
Con estos datos saca una regla de tres para poder mapear el punto máximo a 180 y el mínimo a 0 que son que tanto se puede mover un servomotor.
El programa del arduino es igual de simple, este lee los primeros 4 caracteres, siendo el primero el dedo que se va a mover y los otros 3 la cantidad, ejemplo: T180 (mover el pulgar Thumb a la posición 180)
#include
Servo thumb;
Servo index;
Servo middle;
Servo ring;
Servo pinky;
byte test[5];
int c;
int d;
int u;
int result;
void setup() {
Serial.begin(9600);
thumb.attach(4);
index.attach(5);
middle.attach(6);
ring.attach(7);
pinky.attach(8);
}
void loop() {
if (Serial.available()){
Serial.readBytes(test,5);
c = test[1] - 48;
d = test[2] - 48;
u = test[3] - 48;
result = (c\*100)+(d\*10)+u;
//Serial.println(result);
char dedo = test[0];
switch (dedo){
case 'T': // Thumb
thumb.write(result);
break;
case 'I': // Index
index.write(result);
break;
case 'M': // Middle
middle.write(result);
break;
case 'R': // ring
ring.write(result);
break;
case 'P': // Pinky
pinky.write(result);
break;
default:
Serial.println("Not found");
break;
}
}
}
Ahora que ya tenemos las dos partes funcionando debemos unirlas, para esto se usaría python y la librería Pyseríal, y para hacerlo más modular con para hacerlos con objetos para tener la posibilidad de tener diferentes manos cree este objeto
import seríal
class hand():
def __init__(self):
self.ard = seríal.Serial('/dev/ttyACM0',9600)
#ard = seríal.Serial('COM3', 9600)
def thumb(self, num:int):
nu = str(num)
st = f"T{nu.zfill(3)}\n"
self.ard.write(st.encode('UTF-8'))
def index(self, num:int):
nu = str(num)
st = f"I{nu.zfill(3)}\n"
self.ard.write(st.encode('UTF-8'))
def middle(self, num:int):
nu = str(num)
st = f"M{nu.zfill(3)}\n"
self.ard.write(st.encode('UTF-8'))
def ring(self, num:int):
nu = str(num)
st = f"R{nu.zfill(3)}\n"
self.ard.write(st.encode('UTF-8'))
def pinky(self, num:int):
nu = str(num)
st = f"P{nu.zfill(3)}\n"
self.ard.write(st.encode('UTF-8'))
def close(self):
self.ard.close()
Que según el dedo que se quiere mover, este enviará el comando necesario al arduino.
y finalmente con el esto el código de python quedaría como:
import cv2
import numpy as np
import mediapipe as mp
import hand
webcam=cv2.VideoCapture(0)
mp_hand= mp.solutions.hands
hands = mp_hand.Hands()
mp_drawing_utils = mp.solutions.drawing_utils
def distancia(
punto1,#:mp.framework.formats.landmark_pb2.NormalizedLandmark
punto2#:mp.framework.formats.landmark_pb2.NormalizedLandmark
)->float:
x=(punto1.x-punto2.x)
y=(punto1.y-punto2.y)
return np.sqrt(x\*\*2+y\*\*2)\*1000
def regla_de_tres(referencia:float, mapear:float)->int:
#if mapear>referencia:return 180
v = referencia/350
p = v\*mapear
if int(p)>180:return 180
return int(p)
mano = hand.hand()
while webcam.isOpened():
succes, img = webcam.read()
if not succes:break
result = hands.process(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
if result.multi_hand_landmarks:
for hand in result.multi_hand_landmarks:
mitad = distancia(hand.landmark[mp_hand.HandLandmark.WRIST],hand.landmark[mp_hand.HandLandmark.MIDDLE_FINGER_MCP])
medio = distancia(hand.landmark[mp_hand.HandLandmark.MIDDLE_FINGER_TIP],hand.landmark[mp_hand.HandLandmark.MIDDLE_FINGER_MCP])
pulgar = distancia(hand.landmark[mp_hand.HandLandmark.THUMB_TIP],hand.landmark[mp_hand.HandLandmark.THUMB_MCP])
indice = distancia(hand.landmark[mp_hand.HandLandmark.INDEX_FINGER_MCP],hand.landmark[mp_hand.HandLandmark.INDEX_FINGER_TIP])
ring = distancia(hand.landmark[mp_hand.HandLandmark.RING_FINGER_MCP],hand.landmark[mp_hand.HandLandmark.RING_FINGER_TIP])
pinky = distancia(hand.landmark[mp_hand.HandLandmark.PINKY_MCP],hand.landmark[mp_hand.HandLandmark.PINKY_TIP])
mano.pinky(regla_de_tres(mitad,pinky\*1.58))
mano.ring(regla_de_tres(mitad,ring\*1.26))
mano.index(regla_de_tres(mitad,indice\*1.12))
mano.thumb(regla_de_tres(mitad,pulgar\*1.25))
mano.middle(regla_de_tres(mitad,medio))
#print(regla_de_tres(mitad,medio))
#print(regla_de_tres(mitad,indice\*1.12)) # Relación 0.9:1 con el medio
#print(regla_de_tres(mitad,ring\*1.26)) # Relación 0.8:1 con el medio
#print(regla_de_tres(mitad,pinky\*1.58)) # Relación 0.6:1 con el medio
#print(regla_de_tres(mitad,pulgar\*1.25)) # Relación 0.8:1 con el medio
mp_drawing_utils.draw_landmarks(img,hand, mp_hand.HAND_CONNECTIONS)
cv2.imshow("image",img)
cv2.waitKey(1)
webcam.release()
cv2.destroyAllWindows()